Thiên nhiên mất hàng triệu năm để tạo ra những sinh vật bay hoàn hảo theo dạng đập cánh và con người đang cố hiện thực chúng dưới dạng máy bay không người lái.
Cách đây năm năm, hai kỹ sư của Công ty Nghiên cứu và Phát triển PSI ở bang Massachusetts là Richard Guiler và Tom Vaneck đang ngồi trong một quán rượu cách văn phòng của họ vài dãy phố, cố không nghĩ đến công việc. Trong gần một năm, họ đã đánh vật với việc phát triển máy bay không người lái (MBKNL) có kết cấu chắc chắn, có thể lạng lách tránh những đối tượng khác nhau, bay bên trong tòa nhà và trong cả thời tiết mưa bão. Họ đã thử trên những mô hình cánh cố định nhưng nếu đưa vào đủ cảm biến để phát hiện hiệu quả những chướng ngại vật thì máy bay nặng đến độ không bay được; thử dùng trực thăng thì cánh quạt lại bị vướng cành cây, dây điện; thậm chí thiết kế dạng quả bóng có động cơ cũng nỗ tan tành nếu gặp một luồng gió mạnh.
Đang nhâm nhi bia, Guiler và Vaneck quan sát một con ruồi dường như cứ đâm đầu vào cửa sổ. Thay vì vỡ vụn vì sự va chạm này như những chiếc MBKNL của họ thì chú ruồi chỉ bị bật khỏi tấm kính và hồi phục. Rồi lặp lại hành động của nó.
Cả hai nhận ra rằng nếu chế tạo được một hệ thống nhân tạo có khả năng va đập với thứ khác, phục hồi và tiếp tục thì đó sẽ là một cuộc cách mạng.
Ý tưởng vay mượn thiết kế từ thiên nhiên khi đề cập đến khả năng bay chẳng có gì mới; thiên nhiên đã đi trước chúng ta hàng trăm triệu năm nên có được những thiết kế tuyệt diệu. Vì thế, robot trong tương lai không hề giống chút gì với hiện tại mà nhiều khả năng là chúng sẽ giống những con vật ở quanh bạn.
Manh mối bí ẩn của việc bay
Mặc dù côn trùng có cánh rất phổ biến và phân bố khắp trái đất nhưng chúng ta hầu như chưa hiểu biết tường tận cơ chế bay của chúng vốn là dạng đập cánh tới-lui chứ không phải dạng cố định chúng ta thường thấy ở máy bay cánh quạt hay trực thăng.
Để hiểu được cơ chế bay dạng đập cánh, các nhà khoa học phải xem xét từng chi tiết nhỏ nhất. Vào những năm 1970, nhà động vật học Đan Mạch Torkel Weis-Fogh ở Đại học Cambridge đã dùng ảnh chụp tốc độ cao để phân tích chính xác chuyển động cánh của những côn trùng đang bay lơ lửng. Từ đó, ông đã hình thành lý thuyết tổng quát về cơ chế bay của côn trùng và khái niệm mà ông gọi là “hiệu ứng vỗ và liệng”. Khi những đôi cánh côn trùng cùng vỗ rồi tách biệt nhau thành những đôi cánh đập xuống và những đôi cánh vỗ lên, chuyển động này tống không khí đi và tạo ra những vùng không khí áp suất thấp. Không khí sẽ ập đến những vùng này để tạo nên những lốc xoáy nhiễu loạn. Lốc khí này tạo ra lực cần thiết để nâng côn trùng lên giữa những lần vỗ cánh. Weis-Fogh còn chỉ ra rằng những lốc khí tương tự có thể được tạo ra do góc hay mức độ quay của cánh cấp thêm những lực nâng bổ sung.
Hai thập niên sau, kỹ thuật điện toán đã bắt kịp lý thuyết và các nhà khoa học bắt đầu áp dụng những nguyên lý này vào những hệ thống mô phỏng nhân tạo. Charles Ellington, một nhà động vật học của Cambridge và là học trò của Weis-Fogh đã chế tạo cánh robot có thể nhái một cách chính xác những chuyển động của con ngài. Ông đã đặt nó trong một đường hầm đầy gió, khói để khi nó vỗ cánh thì ông có thể phân tích được khí động học. Tương tự, tại Đại học California, Berkeley, nhà sinh học thần kinh Michael Dickinson chế tạo một cái cánh robot nhái chuyển động tự nhiên của ruồi giấm và ông đã ngâm nó vào một cái thùng chứa 2 tấn dầu khoáng để tìm hiểu những đặc điểm động học lưu chất. Dickinson và kỹ sư điện tử Ron Fearing đoạt giải DARPA 2,5 triệu USD vào năm 1998 để áp dụng những nguyên lý này vào robot lớn cỡ con ruồi. Họ phân công sinh viên sau đại học là Rob Wood hỗ trợ việc phát triển kỹ thuật chế tạo những chi tiết tí hon và lắp ráp kỳ công bằng nhíp. Wood cho biết “Những con ruồi này có quỹ đạo hết sức phức tạp, có rất nhiều sự việc tinh vi phát sinh trong quá trình phát triển...; và Dickinson cho chúng tôi biết những đặc điểm quan trọng nhất để tạo ra lốc khí và những hiệu ứng khí động khác”.
Lúc Wood tốt nghiệp năm 2004 và mở phòng thí nghiệm riêng ở Đại học Harvard, anh đã giúp những nhà tiên phong này sử dụng những vật liệu mới cực kỳ hiệu quả về mặt năng lượng để tái lập chuyển động cánh của ruồi; anh đã chế tạo một con quay hồi chuyển có khả năng nhại theo những “cảm biến” mà côn trùng sử dụng để kiểm soát tốc độ quay của cơ thể; anh cũng sáng tạo những phương pháp để chế tạo các hệ thống phức tạp ở kích thước tí hon.
Robot bay: bước chập chững của MBKNL
Một ngày lạnh lẽo năm 2006, Wood tới phòng thí nghiệm của mình trên đường Oxford tại Harvard. Trên chiếc ghế là con robot nặng 60 mg có sãi cánh 3 cm và phần ngực gần bằng của con ruồi. Nó được nối với chiếc máy tính cao 1,8 m, gắn đầy những bộ khuyếch đại điện thế và những thiết bị thu thập dữ liệu. Wood cẩn thận kiểm tra mọi kết nối và tín hiệu. Anh bật công tắc và quan sát những chiếc cánh của robot tí hon bắt đầu chuyển động, nâng con robot bay lên vài giây. Wood nhảy cẩng lên vì vui sướng. Anh mất 7 năm để đạt được kết quả này và rồi mất thêm 5 năm để có được kết quả đột phá là chuyến bay ổn định theo một lộ trình đã được lập sẵn. Năm 2012, một nghiên cứu sinh sau đại học cũng đã đưa đoạn video về mẫu thử nghiệm mới này lên website của phòng thí nghiệm, tên của con robot là RoboBee (ong máy), giới thiệu một cỗ máy tinh xảo, bé bằng con ong, bay trong không khí và lần đầu tiên cho thấy khả năng bay lơ lửng theo điều khiển một cách ổn định. Wood là người tiên phong trong lĩnh vực bay của robot kích thước nhỏ và những nhà nghiên cứu khác đã tận dụng đặc điểm động học của vỗ cánh để tăng khả năng tải.
Năm 2011, Tổ chức AeroVironment đóng ở California đã trình diễn chú chim ruồi nano của họ (Nano Hummingbird), chiếc máy bay này có sãi cánh 16,5 cm, có khả năng bay đứng và bay ngang hay bay tại chỗ trong gió mạnh. Tuy chỉ nặng 19 g (nặng cỡ viên pin AA) nhưng nó chở được một camera, hệ thống truyền thông và nguồn năng lượng.
| | | | | | Khí động học côn trùng
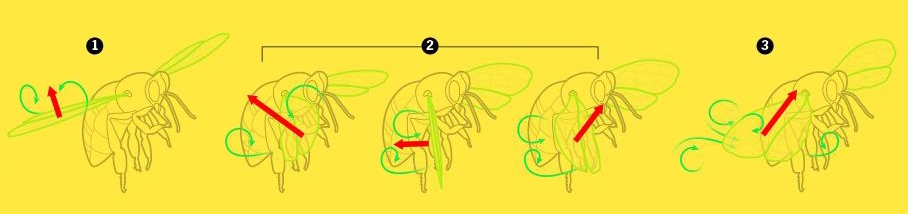
1. Khi cánh đập, luồng không khí xoáy như lốc hình thành dọc theo mép, đột ngột làm giảm áp suất không khí phía trên cánh; áp suất không khí cao hơn sẽ đẩy bên dưới cánh.
2. Cánh xoay để chuẩn bị đập theo hướng đối nghịch, tạo nên lực xoáy như trong quả bóng tennis, hút nhanh luồng không khí vào bề mặt trên.
3. Khi cánh chuyển động theo hướng đối nghịch, nó va chạm với những lốc xoáy do lần đập cánh trước tạo ra và tùy góc độ của cánh lúc va đập với những đợt sóng không khí này mà tạo thêm lực nâng hay lực đè. | | | | | | |
TechJect là công ty con của Viện Công nghệ Georgia gần đây đã công bố con robot chuồn chuồn có sãi cánh khoảng 15 cm và chỉ nặng 5,5 g, mang được máy quay video độ phân giải cao và truyền thông không dây. Robot chuồn chuồn của TechJect tận dụng được một nguyên lý khí động học có tên là cộng hưởng, khi đó cánh đập ở tần số hiệu quả nhất trong điều kiện mật độ không khí, tốc độ cánh và trọng lượng vật thể cân bằng hoàn hảo, tạo ra những cuộn sóng. Âm thanh lúc đó là tiếng vo ve hay vù vù như khi bạn quan sát chim ruồi hay ong bay. Những máy bay dạng đập cánh tận dụng được tính năng cộng hưởng sẽ tăng đáng kể hiệu quả năng lượng cũng như đạt mức tối ưu về sức nâng.

InstantEye, thiết kế của công ty PSI với những bộ phận hấp thụ va đập
nhái theo cấu trúc cơ thể của ruồi.
Thiết kế MBKNL phức tạp hơn
MBKNL nhỏ, dễ vỡ không giải quyết được khả năng hư hỏng vì những tác động không mong muốn, vì thế Guiler và Vaneck tập trung vào tính chắc chắn. Sau khi quan sát con ruồi ở quán rượu, hai kỹ sư này tìm kiếm người có kinh nghiệm nhại khả năng bay của côn trùng. Họ tạo thành một đội với Wood và đưa phòng thí nghiệm của nhóm hợp nhất với Viện Nghiên cứu Công nghệ Nguồn gốc Sinh học Wyss của Harvard rồi cùng xin tài trợ của không quân Mỹ. Nhóm của Wood đã dùng một hệ thống chụp ảnh để ghi lại và phân tích hành vi bay trước, trong và sau khi ruồi va chạm với kính. Quan sát chi tiết những vị trí của các bộ phận trên cơ thể của ruồi họ có thể đo được chính xác mức độ giật và xoắn của cánh và chân ruồi.
Khi Guiler và Vaneck chiếu chậm đoạn phim họ hết sức kinh ngạc về những gì thấy được: con ruồi bị ngã nhào và mất độ cao rất nhanh nhưng rồi nó cũng hồi phục rất uyển chuyển, rất nhanh và rất ngoạn mục.
Guiler và Vaneck đã nghiên cứu hình dáng đặc trưng của cơ thể ruồi. Bộ vỏ ngoài của nó có cấu trúc như những thành phần của đàn phong cầm đóng vai trò như những bộ phận hấp thụ lực va đập và dường như còn cảm nhận được sự va chạm sắp xảy ra. Ngay trước khi xảy ra va chạm, con ruồi bay ở một góc độ nhằm bảo đảm chân của nó sẽ chạm kính trước. Ngay tại khoảnh khắc va chạm, cánh hoàn toàn bất động. Mỗi khi chú ruồi va vào cửa sổ, nó sẽ uyển chuyển đầu hàng lực va đập và để rơi tự do. Nhưng chỉ trong vài mili giây, dường như trọng tâm của ruồi sẽ đưa nó trở về vị trí ổn định. Rồi cánh của nó đập trở lại, giúp chú ruồi bay tại chỗ ổn định. Không có hệ thống nào do con người làm ra có được khả năng đó.

Bay theo đàn. Ý tưởng dùng nhiều MBKNL tí hon cùng phối hợp thực hiện
nhiệm vụ phức tạp dựa trên những bài học từ những đàn kiến – tự trị, tương tác
và hiểu rõ những thông tin cục bộ dựa trên quan hệ với những cá thể khác.
Họ đã dùng sự hiểu biết sâu sắc này để chỉ đạo việc phát triển một chiếc máy bay có khả năng phục hồi nhanh. Thân máy bay phải chịu được va đập và cánh phải được điều khiển riêng biệt. Vì thế họ thiết kế vỏ ngoài có bốn trục quay kết hợp với những bộ phận hấp thụ va đập, đó là những bộ giảm chấn bằng cao su nằm giữa những phần được chế tạo bằng sợi các bon và nhựa. Máy bay có bốn động cơ với bốn mô tơ riêng để nhái khả năng thay đổi tốc độ của từng cánh vốn mang lại cho côn trùng bốn cánh khả năng điều khiển siêu hạng. Khi máy bay chệch khỏi vị trí hay va phải chướng ngại vật, máy tính của nó sẽ tính toán mức chênh lệch giữa vị trí hiện hành, lộ trình bay đã được lập trình và chế độ bay tự động sẽ được kích hoạt rất linh động để phục hồi tính ổn định.
| Tháng hai năm 2013, họ gửi MBKNL của mình có tên là InstantEye tham dự những thử nghiệm quân sự hàng năm ở Columbus, Georgia. Một trung đội bộ binh đã sử dụng nó để giúp hoàn thành một loạt nhiệm vụ được giao và đã đánh giá nó hạng xanh lá (green) là cấp cao nhất. | | 
Hình mẫu ban đầu của RoboBee,
Harvard Microrobotics Lab. |
Vượt qua những thách thức tương lai
Khi MBKNL tí hon thế hệ đầu tiên có mặt trên thị trường thì những thách thức công nghệ quan trọng vẫn còn đó. Đối với Wood, trở ngại lớn nhất là năng lượng. Khác với những loại lớn hơn là InstantEye, Nano Hummingbird và Dragonfly, RoboBees vẫn phải dùng một nguồn năng lượng bên ngoài. Wood đang dùng kỹ thuật vi chế tạo để cố thu nhỏ pin tích hợp và đang cộng tác với những nhà nghiên cứu ở Harvard, Đại học Washington, Viện Công nghệ Massachusetts (MIT) để đi theo hướng pin mới, vi tế bào nhiên liệu và truyền năng lượng không dây. Theo ước tính của Wood thì chỉ cần một hay hai năm nữa để có thể trình diễn lần đầu tiên những mẫu thí nghiệm có khả năng tự cung cấp năng lượng.
Guiler và Vaneck đang nhắm đến việc thay thế bốn động cơ trên chiếc MBKNL của họ bằng loại cánh đập. InstantEye hiện tốt hơn nhiều so với những MBKNL khác về khả năng phục hồi sau khi bị gió giật hay va chạm nhẹ nhưng động cơ của nó vẫn bị trục trặc vì cành cây hay dây điện. Họ nhận thấy chỉ có những loài chim đập cánh và côn trùng là thích nghi hoàn hảo với môi trường có những chướng ngại vật động như cành cây, nếu nó bị vướng thì chính nhờ vào chuyển động của mình mà thoát ra và chỉ có hệ thống cánh đập làm được điều đó.
Dickinson là người khởi xướng dự án thiết kế robot bay. Hiện ông đang điều hành phòng thí nghiệm tại Đại học Washington và làm việc với những hệ thống hình ảnh cao cấp để nghiên cứu cơ chế bay của côn trùng. Dickinson không chỉ phân tích cơ chế bay, mà còn dùng các điện cực để ghi lại những hoạt động của nơ ron thần kinh trong não của côn trùng. Ông liên kết chúng với hệ thống giả lập bay và đưa ra trước hệ giả lập thị giác, ví dụ một con vật săn mồi để xem phản ứng của chúng, từ đó hiểu được cách các nơ ron trong não xử lý thông tin khi đang bay và cách những thông tin thu thập được chuyển thành hành động. Những thứ đã giúp công trình của Rob Wood khả thi chỉ là những cơ chế căn bản để côn trùng ở được trên không nhưng những kết quả của nhóm này giúp hiểu được cách ruồi chuyển hướng và kiểm soát việc bay.
Nghiên cứu cách thức mà tự nhiên tạo ra những “cảm biến siêu hạng” có thể giúp chế ra những MBKNL nhẹ hơn, thông minh hơn. Khi đạt được điều đó, phạm vi ứng dụng của chúng sẽ mở rộng.
Guiler và Vaneck dự định bán InstantEye cho quân đội và lực lượng hành pháp. Không quân của Anh gần đây cũng đã bắt đầu sử dụng MBKNL tí hon, một loại máy bay trực thăng phóng bằng tay có tên là Black Hornet, để tìm kiếm phiến quân ở Afghanistan. MBKNL tí hon cũng có thể sử dụng trong những tòa nhà, nhờ vậy cảnh sát và lực lượng đặc nhiệm có thể quay phim bên trong tòa nhà văn phòng, ngân hàng hay giữa những tòa nhà chọc trời thường có gió mạnh. Wood thậm chí còn hình dung khả năng sử dụng của RoboBees đa dạng hơn. Một hộp chứa khoảng 1.000 con chỉ nặng khoảng nửa kg và dễ dàng chuyển đến một vùng bị thảm họa để triển khai việc tìm kiếm nạn nhân. Chúng cũng có thể kiểm soát giao thông, môi trường hay thậm chí giúp thụ phấn nhân tạo cho cây trồng. Các nhà nghiên cứu có thể dùng chúng để thu thập dữ liệu ngoài hiện trường.
Dù ứng dụng nào thì MBKNL tí hon cũng không còn là “giấc mơ của Da Vinci”. Chúng đang cất cánh – nhanh nhẹn, phục hồi nhanh và dùng năng lượng của riêng mình.
| | | | | | Những kỹ sư đã phát triển những cỗ máy lấy cảm hứng từ côn trùng, mở cánh cửa đi vào thế giới máy móc hoàn toàn mới: MBKNL cực nhỏ.
RoboBees có thể đến địa điểm gặp thảm họa để tìm kiếm nạn nhân, điều khiển giao thông hay thụ phần cho cây trồng.
| | | | | | |
HỒNG ÂN, STINFO Số 5/2014
Tải bài này về tại đây.